FS産業用ロボット技術者育成講座 過去の最終発表事例
2024年01月19日
- 実施報告
FS産業用ロボット技術者育成講座(第0回トライアル)受講生のロボット(COBOTTA)を使用した自動化の最終課題事例をご紹介致します。受講を検討される際のご参考になれば幸いです。
FS産業用ロボット技術者育成講座とは
未経験・初心者の方でも、産業用ロボットを道具として使えるために必要な基礎知識を身につけることを目標としているオプショナル講座です。人手で行っていた単純作業をロボットで少し自動化できるだけでも、現場の負担が減り、新しい取り組みをするための時間が生まれてきます。本講座は未経験・初心者の方でも、産業用ロボットを道具として使えるために必要な基礎知識を身につけることを目標としています。
発表事例1)部品の選別
・概要
前工程から運ばれてきた部品のQRコード+文字列を読み取り選別して、各部品をそれぞれ決められた場所へ並べなおす。
前工程から流れてくるワークの外形状はほぼ同じだが、微小な差異がありQRコードに品番情報などあり。流れてくるワークの順序はかなり流動的(少量多品種、不規則に変化)
・実際の実装
Python + b-capでCOBOTTAカメラの画像を取得。Python上でOpenCV+Tesseract OCR で部品の情報を取得。COBOTTAの動作を変更して、品名やQRの情報をもとに動作を変更させ、決められた位置へ部品を整列させる

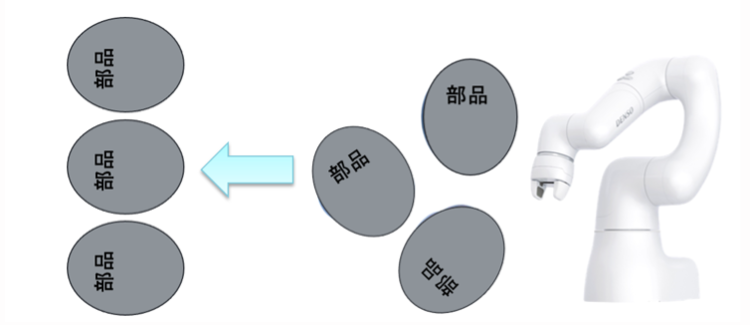
発表事例2)部品整列
・概要
前工程から運ばれてきた部品をカメラで撮像し、部品の向きや位置をみて部品をピッキングし、決められた場所に整列させる。かなり流動的で、少量多品種、不規則に変化。
・実際の実装
PacScript + EVP2 を活用し、ランダムに流れてくる(転がってくる)ワークを認識、向きを整理してピックアンドプレースをして、整列させる。
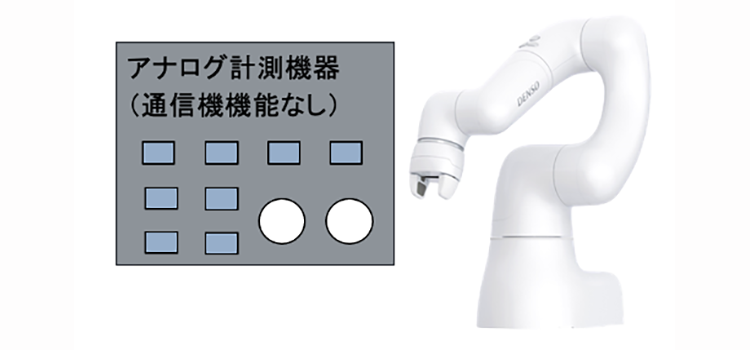
発表事例3)検査作業の自動化
・概要
作成された製品の計測、テストの自動化。
計測機器がアナログ、古い、通信できない。
COBOTTAで操作、液晶モニタ、表示を読み取り、PC,PLCなどでデータ送付
・実際の実装
COBOTTAの操作盤から選択された業務選択。COBOTTA動作開始。
業務の機器の制御盤のボタンをCOBOTTAの爪の部分を使ってポチポチ。
ボタンの位置の認識はEVP2検査のコマンド実行や結果の読み取りを実施する。読み取った結果はCOBOTTAの変数に保存されるまで、実装完了。